你好,我是唐聪。
在上一讲中,我和你分享了etcd的前世今生,同时也为你重点介绍了etcd v2的不足之处,以及我们现在广泛使用etcd v3的原因。
今天,我想跟你介绍一下etcd v3的基础架构,让你从整体上对etcd有一个初步的了解,心中能构筑起一幅etcd模块全景图。这样,在你遇到诸如“Kubernetes在执行kubectl get pod时,etcd如何获取到最新的数据返回给APIServer?”等流程架构问题时,就能知道各个模块由上至下是如何紧密协作的。
即便是遇到请求报错,你也能通过顶层的模块全景图,推测出请求流程究竟在什么模块出现了问题。
基础架构
下面是一张etcd的简要基础架构图,我们先从宏观上了解一下etcd都有哪些功能模块。
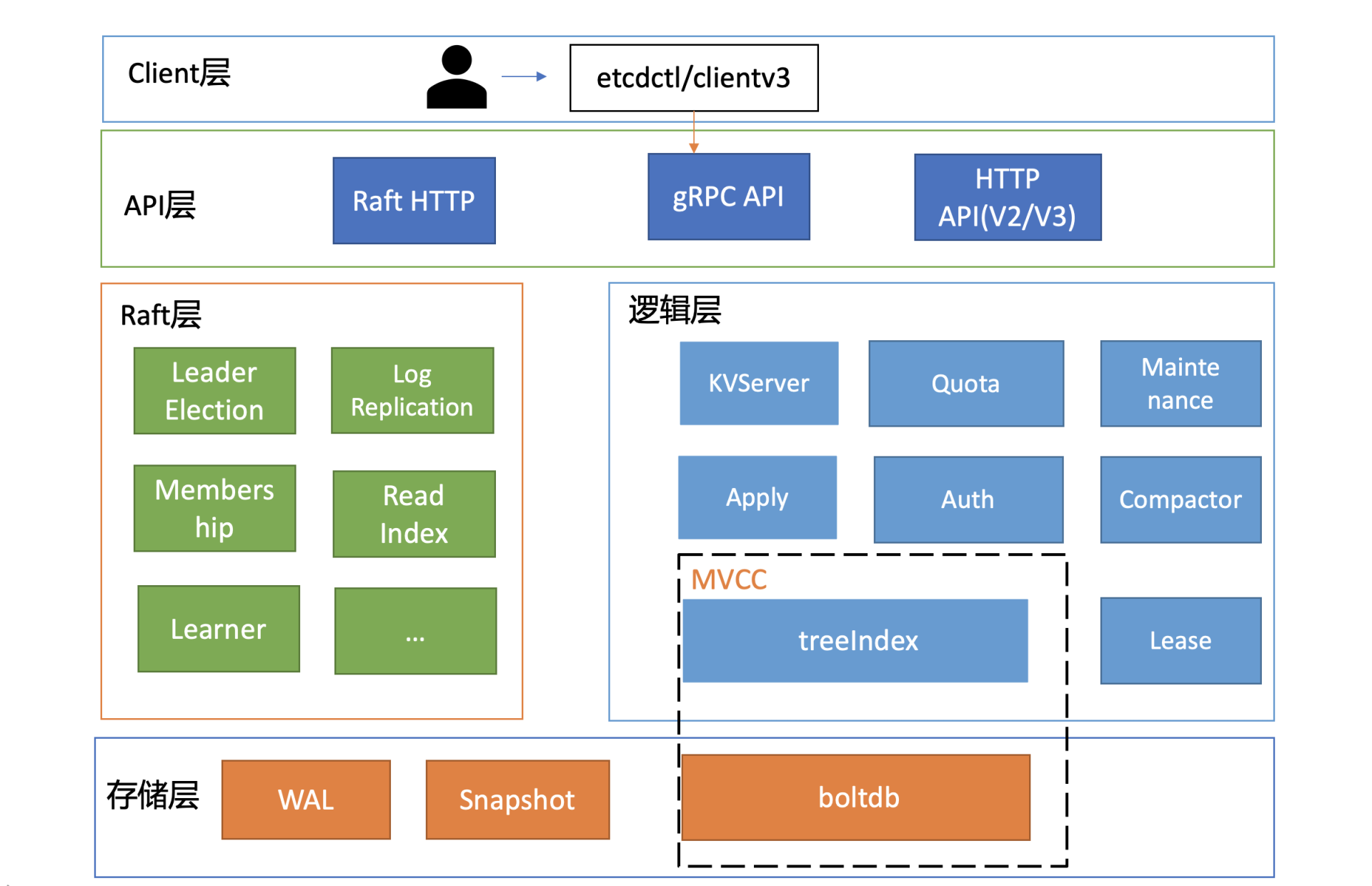
你可以看到,按照分层模型,etcd可分为Client层、API网络层、Raft算法层、逻辑层和存储层。这些层的功能如下:
-
Client层:Client层包括client v2和v3两个大版本API客户端库,提供了简洁易用的API,同时支持负载均衡、节点间故障自动转移,可极大降低业务使用etcd复杂度,提升开发效率、服务可用性。
-
API网络层:API网络层主要包括client访问server和server节点之间的通信协议。一方面,client访问etcd server的API分为v2和v3两个大版本。v2 API使用HTTP/1.x协议,v3 API使用gRPC协议。同时v3通过etcd grpc-gateway组件也支持HTTP/1.x协议,便于各种语言的服务调用。另一方面,server之间通信协议,是指节点间通过Raft算法实现数据复制和Leader选举等功能时使用的HTTP协议。
-
Raft算法层:Raft算法层实现了Leader选举、日志复制、ReadIndex等核心算法特性,用于保障etcd多个节点间的数据一致性、提升服务可用性等,是etcd的基石和亮点。
-
功能逻辑层:etcd核心特性实现层,如典型的KVServer模块、MVCC模块、Auth鉴权模块、Lease租约模块、Compactor压缩模块等,其中MVCC模块主要由treeIndex模块和boltdb模块组成。
-
存储层:存储层包含预写日志(WAL)模块、快照(Snapshot)模块、boltdb模块。其中WAL可保障etcd crash后数据不丢失,boltdb则保存了集群元数据和用户写入的数据。
etcd是典型的读多写少存储,在我们实际业务场景中,读一般占据2/3以上的请求。为了让你对etcd有一个深入的理解,接下来我会分析一个读请求是如何执行的,带你了解etcd的核心模块,进而由点及线、由线到面地帮助你构建etcd的全景知识脉络。
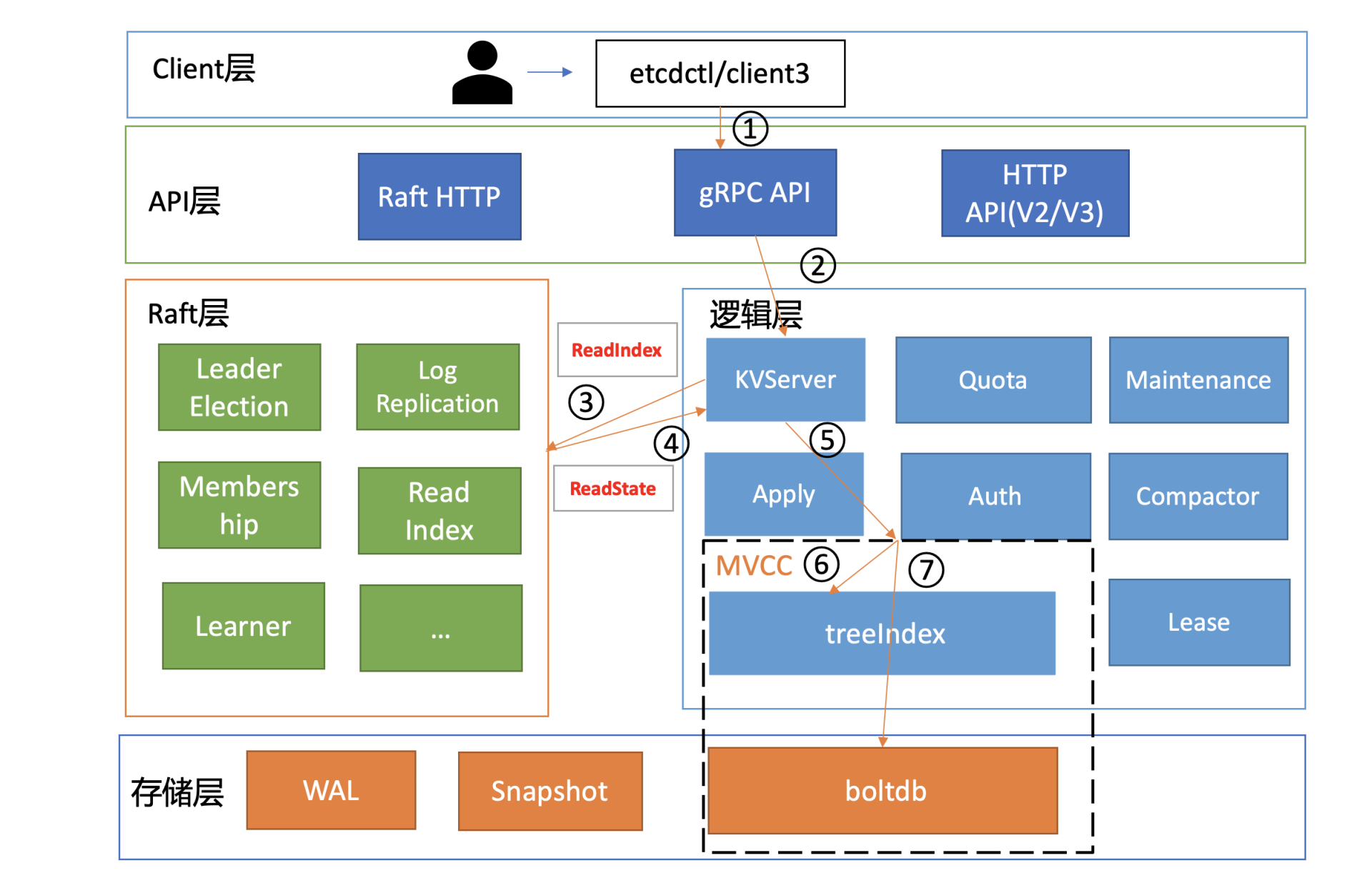
在下面这张架构图中,我用序号标识了etcd默认读模式(线性读)的执行流程,接下来,我们就按照这个执行流程从头开始说。
环境准备
首先介绍一个好用的进程管理工具goreman,基于它,我们可快速创建、停止本地的多节点etcd集群。
你可以通过如下go get命令快速安装goreman,然后从etcd release页下载etcd v3.4.9二进制文件,再从etcd源码中下载goreman Procfile文件,它描述了etcd进程名、节点数、参数等信息。最后通过goreman -f Procfile start命令就可以快速启动一个3节点的本地集群了。
go get github.com/mattn/goreman
client
启动完etcd集群后,当你用etcd的客户端工具etcdctl执行一个get hello命令(如下)时,对应到图中流程一,etcdctl是如何工作的呢?
etcdctl get hello --endpoints http://127.0.0.1:2379
hello
world
首先,etcdctl会对命令中的参数进行解析。我们来看下这些参数的含义,其中,参数“get”是请求的方法,它是KVServer模块的API;“hello”是我们查询的key名;“endpoints”是我们后端的etcd地址,通常,生产环境下中需要配置多个endpoints,这样在etcd节点出现故障后,client就可以自动重连到其它正常的节点,从而保证请求的正常执行。
在etcd v3.4.9版本中,etcdctl是通过clientv3库来访问etcd server的,clientv3库基于gRPC client API封装了操作etcd KVServer、Cluster、Auth、Lease、Watch等模块的API,同时还包含了负载均衡、健康探测和故障切换等特性。
在解析完请求中的参数后,etcdctl会创建一个clientv3库对象,使用KVServer模块的API来访问etcd server。
接下来,就需要为这个get hello请求选择一个合适的etcd server节点了,这里得用到负载均衡算法。在etcd 3.4中,clientv3库采用的负载均衡算法为Round-robin。针对每一个请求,Round-robin算法通过轮询的方式依次从endpoint列表中选择一个endpoint访问(长连接),使etcd server负载尽量均衡。
关于负载均衡算法,你需要特别注意以下两点。
- 如果你的client 版本<= 3.3,那么当你配置多个endpoint时,负载均衡算法仅会从中选择一个IP并创建一个连接(Pinned endpoint),这样可以节省服务器总连接数。但在这我要给你一个小提醒,在heavy usage场景,这可能会造成server负载不均衡。
- 在client 3.4之前的版本中,负载均衡算法有一个严重的Bug:如果第一个节点异常了,可能会导致你的client访问etcd server异常,特别是在Kubernetes场景中会导致APIServer不可用。不过,该Bug已在 Kubernetes 1.16版本后被修复。
为请求选择好etcd server节点,client就可调用etcd server的KVServer模块的Range RPC方法,把请求发送给etcd server。
这里我说明一点,client和server之间的通信,使用的是基于HTTP/2的gRPC协议。相比etcd v2的HTTP/1.x,HTTP/2是基于二进制而不是文本、支持多路复用而不再有序且阻塞、支持数据压缩以减少包大小、支持server push等特性。因此,基于HTTP/2的gRPC协议具有低延迟、高性能的特点,有效解决了我们在上一讲中提到的etcd v2中HTTP/1.x 性能问题。
KVServer
client发送Range RPC请求到了server后,就开始进入我们架构图中的流程二,也就是KVServer模块了。
etcd提供了丰富的metrics、日志、请求行为检查等机制,可记录所有请求的执行耗时及错误码、来源IP等,也可控制请求是否允许通过,比如etcd Learner节点只允许指定接口和参数的访问,帮助大家定位问题、提高服务可观测性等,而这些特性是怎么非侵入式的实现呢?
答案就是拦截器。
拦截器
etcd server定义了如下的Service KV和Range方法,启动的时候它会将实现KV各方法的对象注册到gRPC Server,并在其上注册对应的拦截器。下面的代码中的Range接口就是负责读取etcd key-value的的RPC接口。
service KV {
// Range gets the keys in the range from the key-value store.
rpc Range(RangeRequest) returns (RangeResponse) {
option (google.api.http) = {
post: "/v3/kv/range"
body: "*"
};
}
....
}
拦截器提供了在执行一个请求前后的hook能力,除了我们上面提到的debug日志、metrics统计、对etcd Learner节点请求接口和参数限制等能力,etcd还基于它实现了以下特性:
- 要求执行一个操作前集群必须有Leader;
- 请求延时超过指定阈值的,打印包含来源IP的慢查询日志(3.5版本)。
server收到client的Range RPC请求后,根据ServiceName和RPC Method将请求转发到对应的handler实现,handler首先会将上面描述的一系列拦截器串联成一个执行,在拦截器逻辑中,通过调用KVServer模块的Range接口获取数据。
串行读与线性读
进入KVServer模块后,我们就进入核心的读流程了,对应架构图中的流程三和四。我们知道etcd为了保证服务高可用,生产环境一般部署多个节点,那各个节点数据在任意时间点读出来都是一致的吗?什么情况下会读到旧数据呢?
这里为了帮助你更好的理解读流程,我先简单提下写流程。如下图所示,当client发起一个更新hello为world请求后,若Leader收到写请求,它会将此请求持久化到WAL日志,并广播给各个节点,若一半以上节点持久化成功,则该请求对应的日志条目被标识为已提交,etcdserver模块异步从Raft模块获取已提交的日志条目,应用到状态机(boltdb等)。
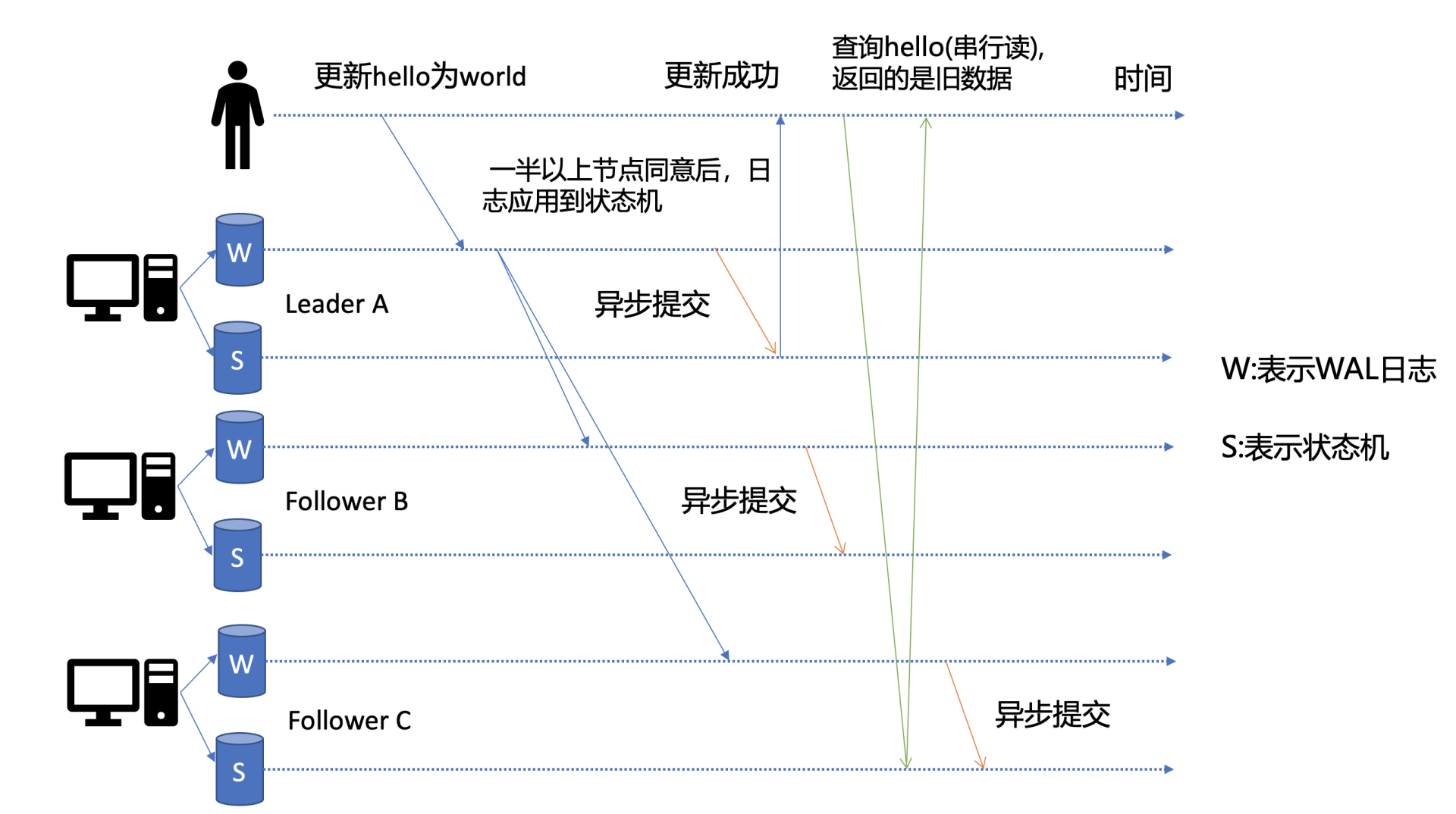
此时若client发起一个读取hello的请求,假设此请求直接从状态机中读取, 如果连接到的是C节点,若C节点磁盘I/O出现波动,可能导致它应用已提交的日志条目很慢,则会出现更新hello为world的写命令,在client读hello的时候还未被提交到状态机,因此就可能读取到旧数据,如上图查询hello流程所示。
从以上介绍我们可以看出,在多节点etcd集群中,各个节点的状态机数据一致性存在差异。而我们不同业务场景的读请求对数据是否最新的容忍度是不一样的,有的场景它可以容忍数据落后几秒甚至几分钟,有的场景要求必须读到反映集群共识的最新数据。
我们首先来看一个对数据敏感度较低的场景。
假如老板让你做一个旁路数据统计服务,希望你每分钟统计下etcd里的服务、配置信息等,这种场景其实对数据时效性要求并不高,读请求可直接从节点的状态机获取数据。即便数据落后一点,也不影响业务,毕竟这是一个定时统计的旁路服务而已。
这种直接读状态机数据返回、无需通过Raft协议与集群进行交互的模式,在etcd里叫做串行(Serializable)读,它具有低延时、高吞吐量的特点,适合对数据一致性要求不高的场景。
我们再看一个对数据敏感性高的场景。
当你发布服务,更新服务的镜像的时候,提交的时候显示更新成功,结果你一刷新页面,发现显示的镜像的还是旧的,再刷新又是新的,这就会导致混乱。再比如说一个转账场景,Alice给Bob转账成功,钱被正常扣出,一刷新页面发现钱又回来了,这也是令人不可接受的。
以上的业务场景就对数据准确性要求极高了,在etcd里面,提供了一种线性读模式来解决对数据一致性要求高的场景。
什么是线性读呢?
你可以理解一旦一个值更新成功,随后任何通过线性读的client都能及时访问到。虽然集群中有多个节点,但client通过线性读就如访问一个节点一样。etcd默认读模式是线性读,因为它需要经过Raft协议模块,反应的是集群共识,因此在延时和吞吐量上相比串行读略差一点,适用于对数据一致性要求高的场景。
如果你的etcd读请求显示指定了是串行读,就不会经过架构图流程中的流程三、四。默认是线性读,因此接下来我们看看读请求进入线性读模块,它是如何工作的。
线性读之ReadIndex
前面我们聊到串行读时提到,它之所以能读到旧数据,主要原因是Follower节点收到Leader节点同步的写请求后,应用日志条目到状态机是个异步过程,那么我们能否有一种机制在读取的时候,确保最新的数据已经应用到状态机中?
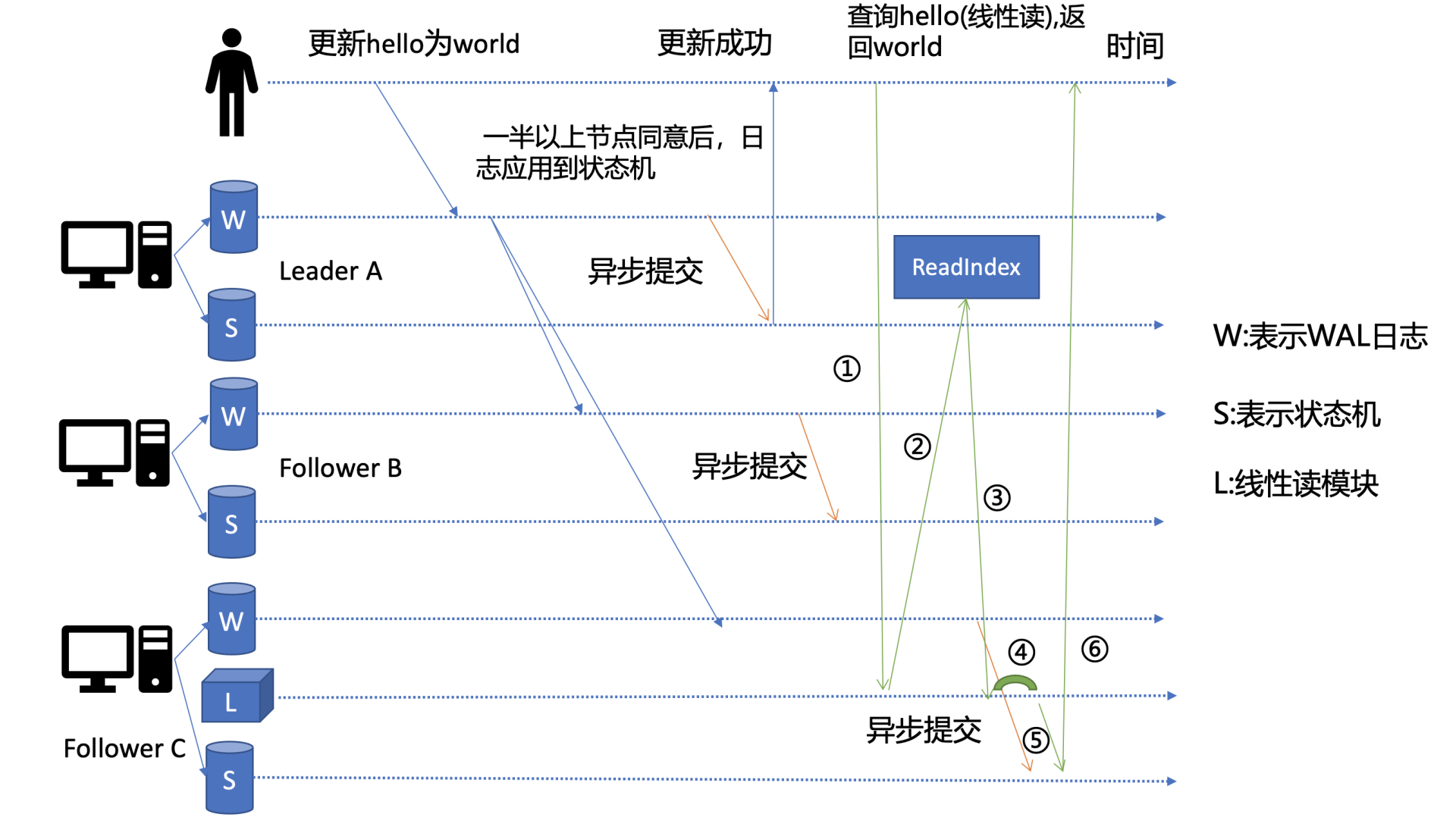
其实这个机制就是叫ReadIndex,它是在etcd 3.1中引入的,我把简化后的原理图放在了上面。当收到一个线性读请求时,它首先会从Leader获取集群最新的已提交的日志索引(committed index),如上图中的流程二所示。
Leader收到ReadIndex请求时,为防止脑裂等异常场景,会向Follower节点发送心跳确认,一半以上节点确认Leader身份后才能将已提交的索引(committed index)返回给节点C(上图中的流程三)。
C节点则会等待,直到状态机已应用索引(applied index)大于等于Leader的已提交索引时(committed Index)(上图中的流程四),然后去通知读请求,数据已赶上Leader,你可以去状态机中访问数据了(上图中的流程五)。
以上就是线性读通过ReadIndex机制保证数据一致性原理, 当然还有其它机制也能实现线性读,如在早期etcd 3.0中读请求通过走一遍Raft协议保证一致性, 这种Raft log read机制依赖磁盘IO, 性能相比ReadIndex较差。
总体而言,KVServer模块收到线性读请求后,通过架构图中流程三向Raft模块发起ReadIndex请求,Raft模块将Leader最新的已提交日志索引封装在流程四的ReadState结构体,通过channel层层返回给线性读模块,线性读模块等待本节点状态机追赶上Leader进度,追赶完成后,就通知KVServer模块,进行架构图中流程五,与状态机中的MVCC模块进行进行交互了。
MVCC
流程五中的多版本并发控制(Multiversion concurrency control)模块是为了解决上一讲我们提到etcd v2不支持保存key的历史版本、不支持多key事务等问题而产生的。
它核心由内存树形索引模块(treeIndex)和嵌入式的KV持久化存储库boltdb组成。
首先我们需要简单了解下boltdb,它是个基于B+ tree实现的key-value键值库,支持事务,提供Get/Put等简易API给etcd操作。
那么etcd如何基于boltdb保存一个key的多个历史版本呢?
比如我们现在有以下方案:方案1是一个key保存多个历史版本的值;方案2每次修改操作,生成一个新的版本号(revision),以版本号为key, value为用户key-value等信息组成的结构体。
很显然方案1会导致value较大,存在明显读写放大、并发冲突等问题,而方案2正是etcd所采用的。boltdb的key是全局递增的版本号(revision),value是用户key、value等字段组合成的结构体,然后通过treeIndex模块来保存用户key和版本号的映射关系。
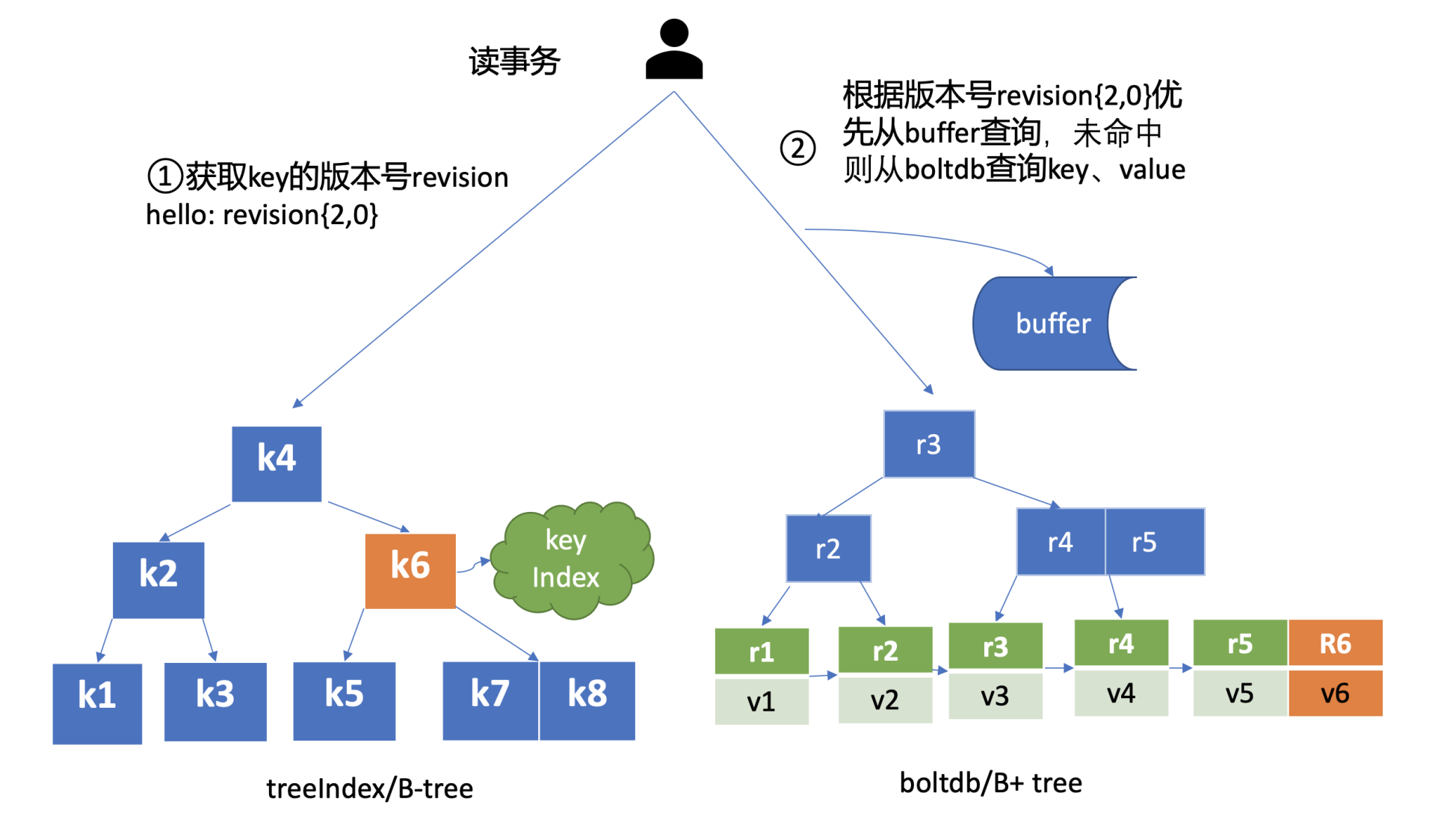
treeIndex与boltdb关系如下面的读事务流程图所示,从treeIndex中获取key hello的版本号,再以版本号作为boltdb的key,从boltdb中获取其value信息。
treeIndex
treeIndex模块是基于Google开源的内存版btree库实现的,为什么etcd选择上图中的B-tree数据结构保存用户key与版本号之间的映射关系,而不是哈希表、二叉树呢?在后面的课程中我会再和你介绍。
treeIndex模块只会保存用户的key和相关版本号信息,用户key的value数据存储在boltdb里面,相比ZooKeeper和etcd v2全内存存储,etcd v3对内存要求更低。
简单介绍了etcd如何保存key的历史版本后,架构图中流程六也就非常容易理解了, 它需要从treeIndex模块中获取hello这个key对应的版本号信息。treeIndex模块基于B-tree快速查找此key,返回此key对应的索引项keyIndex即可。索引项中包含版本号等信息。
buffer
在获取到版本号信息后,就可从boltdb模块中获取用户的key-value数据了。不过有一点你要注意,并不是所有请求都一定要从boltdb获取数据。
etcd出于数据一致性、性能等考虑,在访问boltdb前,首先会从一个内存读事务buffer中,二分查找你要访问key是否在buffer里面,若命中则直接返回。
boltdb
若buffer未命中,此时就真正需要向boltdb模块查询数据了,进入了流程七。
我们知道MySQL通过table实现不同数据逻辑隔离,那么在boltdb是如何隔离集群元数据与用户数据的呢?答案是bucket。boltdb里每个bucket类似对应MySQL一个表,用户的key数据存放的bucket名字的是key,etcd MVCC元数据存放的bucket是meta。
因boltdb使用B+ tree来组织用户的key-value数据,获取bucket key对象后,通过boltdb的游标Cursor可快速在B+ tree找到key hello对应的value数据,返回给client。
到这里,一个读请求之路执行完成。
小结
最后我们来小结一下,一个读请求从client通过Round-robin负载均衡算法,选择一个etcd server节点,发出gRPC请求,经过etcd server的KVServer模块、线性读模块、MVCC的treeIndex和boltdb模块紧密协作,完成了一个读请求。
通过一个读请求,我带你初步了解了etcd的基础架构以及各个模块之间是如何协作的。
在这过程中,我想和你特别总结下client的节点故障自动转移和线性读。
一方面, client的通过负载均衡、错误处理等机制实现了etcd节点之间的故障的自动转移,它可助你的业务实现服务高可用,建议使用etcd 3.4分支的client版本。
另一方面,我详细解释了etcd提供的两种读机制(串行读和线性读)原理和应用场景。通过线性读,对业务而言,访问多个节点的etcd集群就如访问一个节点一样简单,能简洁、快速的获取到集群最新共识数据。
早期etcd线性读使用的Raft log read,也就是说把读请求像写请求一样走一遍Raft的协议,基于Raft的日志的有序性,实现线性读。但此方案读涉及磁盘IO开销,性能较差,后来实现了ReadIndex读机制来提升读性能,满足了Kubernetes等业务的诉求。
思考题
etcd在执行读请求过程中涉及磁盘IO吗?如果涉及,是什么模块在什么场景下会触发呢?如果不涉及,又是什么原因呢?
你可以把你的思考和观点写在留言区里,我会在下一节课里给出我的答案。
感谢你阅读,也欢迎你把这篇文章分享给更多的朋友一起阅读,我们下节课见。
精选留言
2021-02-16 15:53:29
2021-01-26 13:37:56
1, KVServer中的拦截器
我认为它只是作为一个辅助的功能吧,用于实现一些观测功能。但对于一个普通的读请求,是否必须通过拦截器才能完成读取数据的操作?
2, 文中“handler 首先会将上面描述的一系列拦截器串联成一个执行”
这段话中,拦截器是一系列的,一系列是指会有多个拦截器吗?难道不是一个请求只注册一个拦截器吗,还能注册多个?为什么要注册多个?
“串联成一个执行”,如何串联成一个?将多个拦截器串联成一个拦截器?
3, 串行读与线性读
这里我理解串行读是“非强一致性读”,线性读是“强一致性读”,对吗?
而且这里的“串行”总让我想到“并行/串行”的概念,不知有关系吗?
4, ReadIndex,committed index,applied index
这几种索引底层实现是一样的吗,它们的数据结构是怎样的?是对同一份数据,分别建立不同的索引?又为什么建立这么多种索引?
5,版本号
您说是一个递增的全局ID, revision{2, 0},ID指的是2还是0? 版本号的格式是怎样的,另一个数字代表什么?
6, bucket
请问一个 bucket 相当于一整个 B+ tree 索引树吗?还是相当于 B+ tree 中一个节点?
2021-01-26 09:56:40
2021-01-26 10:10:53
2021-01-22 20:28:21
在client 3.4之前的版本中,负载均衡算法有一个严重的Bug:如果第一个节点异常了,可能会导致你的client访问etcd server异常。
(1)这里第一个节点怎么理解呢? 是指的负载均衡刚好选中的那个etcd server节点异常吗?
(2)如果访问的节点异常了,是client库中会做重试机制,还是业务代码需要做重试呢?
2021-01-22 13:13:06
2021-01-27 15:12:58
所有的client请求不是应该都通过leader下发至follower吗?
2021-01-26 19:39:48
2021-02-04 15:06:15
答: 涉及到磁盘, 当读请求从treeIndex获取到用户的 key 和相关版本号信息后,去查询value值时, 没有命中 buffer, 会从boltdb获取数据, 这个时候就涉及到了磁盘。
2021-01-22 17:19:24
请问,此句提到的负载均衡算法是否等同:随机选中某个IP?
2021-01-22 09:27:55
2021-10-09 11:40:01
但12中提到,“etcd 无论 Apply 流程是成功还是失败,都会更新 raftAppliedIndex 值"。那岂不是即使apply失败了,也会更新raftAppliedIndex ,但其实follower并没真正赶上leader,读到的还是旧数据?
2022-01-24 00:27:42
我用的是etcd Version: 3.5.0版本
1、需要将etcd解压文件夹下的bin文件目录设置到环境变量中,
官网文档修改环境变量用的是export的方式,该方式只会在
当前会话生效(难怪我打开别的终端窗口就执行不了etcd的
命令)可以通过sudo vim ./bash_profile的方式添加
全局才会生效
2、文稿中的下载 goreman Procfile的文件需要做一点修改把
“bin/etcd”改成“etcd”即可因为我们刚刚设置了全局的环境变
量
3、etcdctl get hello --endpoints http://127.0.0.1:2379
没有输出任何内容,这个人猜测是因为版本于老师版本不一致的原因
我用官网快速开始文档教程动手试了试有输出正常的hello etcd的
(以上是我在安装etcd踩的坑,因为我比较小白,贴出来印象深刻些,
毕竟老师的课堂作业做不出来,也不想空着)
2021-01-26 17:49:27
2021-01-23 16:41:54
2021-01-22 17:36:21
2021-01-22 08:49:38
2022-11-09 11:29:52
2022-07-22 16:35:25
* 节点C 从 Leader 节点获取最新提交的日志索引 committed index
* Leader 节点为了防止脑裂会向 Follower 节点 B C 发送心跳确认, 一半以上的 Follower 节点确认后, Leader 才会将最新的 committed index 发送给 C 节点
* C 节点会比较自己的日志索引和 Leader 的 committed index, 如果小于就等待
* 如果大于等于, 首先从 treeIndex 内存模块中获取 `/foo` 的版本号
* 然后通过 `/foo/v2` 从 buffer 内存里面获取 value
* 如果 buffer 里面没有, 就从 boltdb 磁盘中获取
* 返回 client 数据
2022-03-13 21:21:43